
Remember me

In virtual and augmented reality applications, multi-sensory feedback is essential for creating a realistic immersive experience (Hecht and Reiner 2009; Sengül et al. 2013; Apostolou and Liarokapis 2022). Haptics is one of the primary sensory modalities in humans (Srinivasan 1995; Hannaford and Okamura 2016). This modality allows us to identify, discriminate, and recognize objects from the touch, which is crucial for daily tasks and interactions. Haptic perception is driven by two key components: cutaneous (Prattichizzo et al. 2012), which involves the sense of touch through the skin, and kinesthetic (Chaudhuri and Bhardwaj 2017), which relates to the awareness of body position and movement. Both can occur through active as well as passive exploration (Lederman and Klatzky 2009; Rodríguez et al. 2019). In this study, we specifically focus on passive kinesthetic force perception, which we refer to simply as haptic force perception throughout the study.
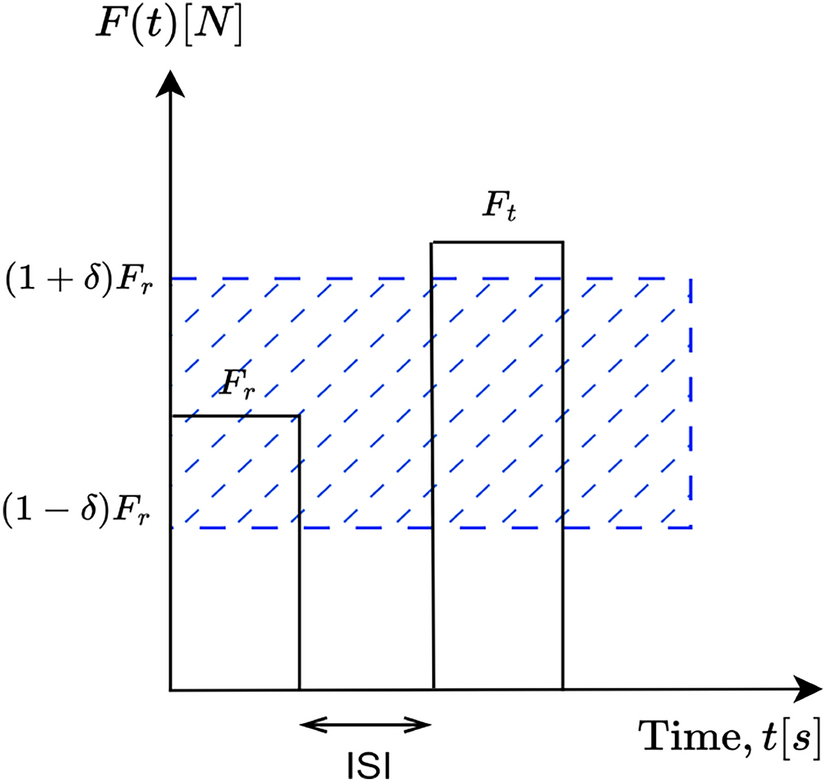
Fig. 1
Force discrimination between two force level \(F_r\) and \(F_t\) separated by a inter-stimulus interval (ISI). Perceptual deadband for \(F_r\) is also represented by the dashed area
To provide effective force feedback in a virtual or remote environment, it is important to understand how humans discriminate between two different force levels. In the literature, force discrimination has been quantified by the just noticeable difference (JND) or the Weber fraction (\(\delta\)). The JND corresponds to the smallest perceivable change in the reference force \(F_r\), while the Weber fraction (\(\delta\)) is defined by the smallest perceivable relative change in reference force \(F_r\) (i.e., \(\delta =\frac\)). According to Weber’s law on perception (Weber 1851), a test force \(F_t\) will be perceived differently from the reference force \(F_r\) if the following relation is satisfied:
$$\begin \delta = \frac, \end$$
(1)
where \(\delta\) represents the Weber fraction and it typically lies between 7-\(15\%\) for force perception (Jones and Hunter 1990; Pang et al. 1991; Tan et al. 1994; Allin et al. 2002; Schloerb et al. 2006; Steinbach et al. 2018a). Thus, the law defines a region where any change in the reference force \(F_r\) is not perceived, called perceptual deadband. For a given Weber fraction \(\delta\), the perceptual deadband region is defined by the interval \([(1-\delta )F_, (1+\delta )F_]\) around the reference force \(F_r\) (Bhardwaj et al. 2014). For example, the perceptual deadband is shown by the dashed area in Fig. 1, indicates that the test force \(F_t\) will be discriminated against the reference force \(F_r\) since it lies outside the deadband.
While computing the Weber fraction for force perception in most of the studies in the literature, the test and reference forces are kept constant in time and separated by a finite inter-stimulus interval (ISI), as shown in Fig. 1. However, we do not perceive such forces in everyday interactions with the world around us. In real-life scenarios, we perceive a dynamic (i.e., continuously varying) force during both active and passive interactions, as shown in Fig. 2, where there is no inter-stimulus interval (ISI) involved between the forces. In previous studies on force perception, force discrimination is not investigated for such continuously varying forces. It is assumed that the Weber fraction for the constant forces, separated by the ISI, generalizes the perception of the continuous forces. In this study, we question this assumption and determine how the Weber fraction is varied for continuous force discrimination.
Fig. 2
An example of continuous force stimuli F(t) with varying force-rates \(S_1\), \(S_2\), and \(S_3\) between consecutive levels A, B, C, and D respectively
We are better at discriminating a changing stimulus than an unchanging one. For instance, our perception tends to be more sensitive to change in rapidly varying force stimuli and relatively insensitive to a constant (unchanging) or slowly varying stimulus (Bhardwaj and Chaudhuri 2014). As a result, perceiving differences in slowly changing stimuli becomes challenging, which may increase the JND. On the other hand, the change in quickly varying stimuli is perceived easily so it may cause a decrement in the JND. This suggests that discriminating a changing stimulus becomes easier as the rate of change increases. Therefore, it is interesting to know how the force-rate affects continuous force perception. For example, Fig. 2 shows a continuously varying force stimulus with four different force levels at A, B, C, and D. The figure also shows different force-rates between two successive force levels such as \(S_1\), \(S_2\), and \(S_3\). In this scenario, if one wants to discriminate two successive force levels, it will be interesting to investigate whether the force-rates affect the Weber fraction.
In the recent past, the Weber fraction for force perception has also been employed in defining the perceptual adaptive sampling mechanisms for the transmission of the perceptually relevant data points to the other side of telepresence and teleaction systems (TPTA) (Hinterseer et al. 2008; Bhardwaj et al. 2017; Steinbach et al. 2018b). In that, a constant Weber fraction was employed for the purpose, irrespective of how the force stimuli vary. So, the previous studies do not factor the effect of the rate of change in haptic force stimuli into the Weber fraction. For real haptic interaction in a TPTA application, the Weber fractions should account for the variation in the continuous force. So, it will be interesting to find the relationship between the force-rate and the Weber fraction for continuous force discrimination perception.
Related-workIn literature, the effect of the rate of change in stimulus has been observed across various stimuli, such as audio and temperature. Madden (1998); Porter et al. (1991), Van Wieringen and Pols (1994), Moore and Sek (1998) discussed the deviation in thresholds based on the rate of auditory frequency change. Similarly, Hensel (1950), Kenshalo et al. (1968), Molinari et al. (1977), Manasrah et al. (2016) discussed the effect of the rate of temperature change on thermal sensitivity. However, to the best of our knowledge, this relationship has not been studied in the literature regarding force discrimination for continuously varying signals.
Yang et al. (2008) studied how hand movement speed affected haptic force perception, revealing that the JND for force discrimination was higher during hand movement than in static conditions. This implied that the rate of change in hand position affected force perception. This result also suggested that participants were more sensitive when active exploration was included. To isolate this effect, the present study tests under passive conditions.
Li et al. (2023) explored the rate of change in skin deformation by examining compliance discrimination and revealed that the temporal changes in the gross contact area and indentation depth affected the compliance discrimination, regardless of stimulus compliance and indentation velocity. Similarly, Troisi et al. (2024) investigated the impact of contact force on thermal perception and found that an increasing contact force enhanced thermal perception. This result may have been related to the change of contact area rate on the fingertip, which occurred as the contact force between the fingertip and the stimulus-delivering plate. This suggests that force discrimination might be influenced by the force-rate similar to indentation depth on compliance and contact area.
The effect of the inter-stimulus interval (ISI) was not observed for force perception in the literature. However, it has been observed for other stimuli such as temperature, vibrotactile, audio and visual. Hojatmadani et al. (2022) showed the effect of the inter-stimulus interval (ISI) on thermal perception and showed that delaying the second stimulus by 3 seconds increased the JND by \(12\%\), and delaying by 9 seconds increased the JND by \(21\%\). Karim et al. (2013) also investigated the relation between ISI and JND in vibrotactile discrimination and found that the JND was more affected for short ISIs (300-600 ms). Hellström (2003); Gerr and Letz (1994) also demonstrated the impact of ISI while discriminating tone loudness for auditory stimuli and visual size for visual stimuli, respectively. Whereas Bankó et al. (2009) found no effect of ISI in a discrimination task with facial emotional expressions as stimuli.
Thus, we observe that although various aspects of haptic force perception have been studied in the literature, the effect of force-rate on force perception remains unexplored for continuously varying force stimuli.
Contribution and organization of the articleThis study analyzes the effect of force-rate on human force perception. We extend our preliminary study (Bhardwaj and Chaudhuri 2014) in this direction, which suggests that the Weber fraction decreases as the force-rate increases. This study was conducted with 3 participants, focusing on a narrow range of force-rates with a low value of reference force. We revisit this work and design an extensive psychophysical experiment for a broader range of force-rates using a high-resolution haptic device.
A single continuous time-varying haptic force stimulus is presented to a participant along the positive Z-axis of the haptic device, and they are asked to respond whenever they perceive a change in the force. We utilize a machine learning-based approach (Bhardwaj et al. 2014; Bhardwaj 2022; Cha et al. 2022; Chhabaria et al. 2023) to analyze the effect of the rate of force change across the entire range of force-rates. The approach involves a systematic collection of responses to differences from sensory experiments involving stimuli of varying intensities. A machine learning classifier is trained on the recorded responses to estimate a perceptual boundary between the perceived and non-perceived responses. The objective of this study is to determine whether the force-rate influences continuous haptic force discrimination and, if so, determine the relationship between the force-rate and Weber fraction. For this, we aim to find a parametric relation between the force-rate and Weber fraction.
The article is organized as follows. Section 1 discusses the motivation for this work on ‘Continuous Kinesthetic Force Discrimination’, gaps in the existing literature on haptic perception, and the contributions of this work. Section 2 describes the general experimental setup, the force stimuli used, and the data collection process. Section 3 outlines the methodology for estimating the perceptual boundary between the recorded responses. Section 4 analyzes the obtained results from the estimated perceptual boundary with respect to force-rate. Section 5 focuses on the discussions regarding the results and their applicability in the adaptive sampling approach. Finally, Sect. 6 concludes the paper.
Comments (0)