
Remember me
To begin with, it may be necessary to define what “isometric” means. It literally means that both ends of the muscle preparation are fixed, so that muscle length does not change while an experiment is performed. This situation is in contrast to “isotonic” experiments, in which the muscle continuously shortens under a constant load. Consequently, for most applications isometric means that the length is fixed and does not change over time. Sometimes a segmental length is fixed (changing the overall length), which is a desirable measurement when the contraction is heterogeneous; in this case the force is the same throughout the length of the preparation. This requires technical skill. In intact right ventricular trabecular fibers with twitch contraction, Caremani et al. (2016) observed a local sarcomere shortening, which they compensated by stretching for the next twitch, resulting in a larger force development as expected. In single myofibril experiments from rabbit psoas Iorga et al. (2012) closely examined the sarcomere length during Ca activation, but a similar local shortening did not occur.
One advantage of isometric experiments is that CBs are arranged in parallel in the half sarcomere, where all of the elementary steps of the CB cycle take place. Under this condition, there is a possibility of resolving individual elementary steps because CB force is additive in the half sarcomere. This can be seen in 3–4 exponential processes in skeletal muscle fibers (Huxley 1974; Kawai and Brandt 1980; Kawai and Zhao 1993; Wang and Kawai 1997; Galler et al. 2005; Kawai et al. 2018) or 2–3 exponential processes in cardiac muscle strips (Kawai et al. 1993; Wannenburg et al. 2000; Lu et al. 2006). Each one of these exponential processes corresponds to an elementary step in the CB cycle. Because our interest is to resolve the elementary steps of the CB cycle, we chose to use the isometric condition.
Since results may not necessarily be the same if measurements were carried out during a force increase, a force decrease, or a steady state, such as experienced by Tesi et al. (2000), they are discussed separately in the following.
3.1. Experiments performed during steady stateI will first review results obtained from sinusoidal analysis, because I am much involved in this analysis method in my research, and I believe that this is one of the best methods to characterize the elementary steps of the CB cycle in structured muscle fiber and myofibril systems. When this analysis method is computerized, it is also an efficient method to produce a large amount of data inexpensively in a short time. I will then compare these results with experiments performed by other investigators. Our strategy is first to measure the apparent rate constants as functions of [Pi] and then to establish the CB scheme together with kinetic constants (intrinsic rate and equilibrium constants). Second, we use these kinetic constants to calculate the occupancy (probability) of CBs at each state as a function of [Pi]. Third, we then correlate the occupancy with measured force as a function of [Pi] to deduce force supported by each CB state.
3.1.1. Sinusoidal analysisThe length change applied during the sinusoidal analysis is very small, in the range of 0.125–0.2% of muscle length, which translates to ≤ 1.25 nm at the CB level when 50% series compliance is considered (Huxley et al. 1994; Wakabayashi et al. 1994). If the length change exceeds the CB’s step size (5.3–12.6 nm) (Kitamura et al. 1999; Lombardi et al. 2004; Sherwood et al. 2004; Wu and Nakamura 2005), then the CB cycles more than once, and the data collected become influenced by the slowest step (~ 16 s−1 in rabbit psoas at 20°C) of the cycle, making it more difficult to resolve faster elementary steps.
Sinusoidal analysis is carried out when force is at a plateau. In many muscles, sinusoidal force change becomes steady (stable and reproducible) after 0.25 s of oscillation, at which point the force and length time courses are collected simultaneously at the maximum speed (every 10 μs with two A/D converters). The 0.25-s duration is chosen because a solution to a linear differential equation with forced oscillation has two components: one transient and the other steady sinusoidal oscillation (see Appendix 1, Eq. A18). The transient is caused by a sudden application of the sinusoidal length change—a similar situation to the step-length-change experiments used by Huxley and Simmons (1971). I assumed that the transient is over in 0.25 s. The signal is averaged for each sine cycle during which time the data are collected, and the time course is analyzed by Fourier transform to deduce elastic and viscous moduli (or amplitude and phase shift) (Kawai and Brandt 1980). Clearly, the more data points that are collected, the better the results. This method is free of the problems associated with force rise or decay, described later (Sections 3.2.3 and 3.3.5). At the same time, it is a steady state measurement, hence the signal-to-noise ratio (S/N) can be improved by prolonging the data collection period. That is, sinusoidal analysis inherently incorporates a signal averaging procedure. As a result, the data are generally more accurate compared to transient analysis on force time courses (these are compared in Kawai 1986); both of these methods seek the same information—“apparent rate constants”—in exponential processes, to establish a sequence of events in the CB cycle.
3.1.2. Study of phosphate (Pi) effectsIn sinusoidal analysis with frequencies ranging from 0.25 to 350 Hz (0.5–650 ms in time domain) in skeletal muscle fibers, three exponential processes A, B, and C were identified, with the apparent (= observed) rate constants 2πa, 2πb, and 2πc, respectively (Kawai et al. 1977; Kawai and Brandt 1980). Of these, 2πb was studied as the function of [Pi] (Fig. 2A). Compared to 2πa and 2πc, 2πb changes most significantly with [Pi] (Kawai 1986). These experiments have demonstrated that 2πb increases with [Pi] and approaches a saturation toward 30 mM [Pi] as shown in Fig. 2A (Kawai and Halvorson 1991; Wang and Kawai 1997). From the plot in Fig. 2A, a three-state model was constructed (Fig. 1B), and two intrinsic rate constants (r4, r−4), and the Pi binding (association) constant (K5) were deduced by fitting the apparent rate constant data 2πb to Eq. 1:
Fig. 2
Experiments on rabbit soleus slow-twitch fibers, activated at pCa 4.40 and 5 mM MgATP at 20°C. The average over nine experiments, with SEM, are shown. A Apparent rate constant 2πb is plotted against [Pi] and fitted to Eq. 1. From this fitting, three kinetic constants (r4 = 5.7 ± 0.5 s−1, r−4 = 4.5 ± 0.5 s−1, and K5 = 0.18 ± 0.01 mM.−1) were deduced. B Changes in CB occupancy X4 (Eq. 2), X5 (Eq. 3), and X6 (Eq. 4) as functions of [Pi], calculated by using K4 (≡r4/r−4 = 1.37 ± 0.13) and K5 obtained from A. Also plotted is X5 + X6 (labelled). C Isometric force (normalized to first control force Tc) is plotted against [Pi] and fitted to Eq. 6 by using K4 and K5 deduced from A. From this fitting, T5 = T6 = 1.29 ± 0.05 Tc (N = 9) was obtained, where Tc = 142 ± 15 kPa (N = 24). In A and C, the curved lines are the best fit results; reproduced from Wang and Kawai (1997)
$$2\uppi b=_+\frac_P}_P}_.$$
(1)
Equation 1 is the analytical form (derived in Appendix 2, Eq. A28) of the apparent rate constant (2πb) measured in the CB scheme shown in Fig. 1B (Kawai and Halvorson 1991), where P = [Pi]. Equation 1 relates intrinsic rate constants (r4, r−4) and the Pi association constant (K5) to the apparent rate constant (2πb). Here we assume that in fibers and/or myofibrils, elementary Steps 4 and 5 are reversible as shown in solution studies (Bagshaw and Trentham 1973), in fiber studies (Hibberd et al. 1985; Webb et al. 1986), and in cryo-EM studies (Llinas et al. 2015). We also assume that Pi binding and/or release (Step 5) is faster than Step 4; hence, Step 5 can be approximated by an equilibrium while Step 4 is measured at frequencies around b.
By fitting the result of P vs. the apparent rate constant 2πb to Eq. 1, two intrinsic rate constants (r4, r−4) and the Pi association constant (K5) of the elementary steps are deduced. The data fit well, as shown by the curved line in Fig. 2A. Once K5 is obtained (found by minimizing the sum of squares by iteration), Eq. 1 is linearly related to r4 and r−4; hence, these are readily deduced by the standard linear fitting procedure, together with the 95% confidence limits on fitted parameters. From this fitting we obtained the following for rabbit psoas fibers: r4 = 56 ± 2 s−1; r−4 = 129 ± 10 s−1; K4 = 0.45 ± 0.05; and K5 = 0.069 ± 0.007 mM−1 (Table 2) (Kawai and Halvorson 1991), and for rabbit soleus slow-twitch fibers (Fig. 2A): r4 = 5.7 ± 0.5 s−1; r−4 = 4.5 ± 0.5 s−1; K4 = 1.37 ± 0.13; and K5 = 0.18 ± 0.01 mM (Table 3) (Wang and Kawai 1997), where numbers after ± represent SEM; the maximum error is 11%. An important reminder here is that only three parameters were extracted from the P vs. rate constant results; therefore, the 95% confidence limits of fitted parameters are narrow (usually less than ± 15% of the value), hence the reliability of these parameters is very high. This is because Fig. 2A is based on the average of nine experiments (9 × 6 = 54 total data points); therefore, the degree of freedom is NDF = 54 − 3 − 1 = 50 (three fitting parameters and one average point are subtracted) and is large. The equilibrium constant K4 of Step 4 is calculated from r4 and r−4 (K4≡r4/r−4).
Table 2 Results of kinetic studies on the Pi release step in rabbit psoas fibers and †psoas myofibrils, studied under the isometric conditionTable 2 summarizes results obtained on rabbit psoas fibers/fibrils from several different laboratories with many different techniques. Their experimental details are discussed in Sects. 3.2–3.3. For ease of comparison, the value of r4 is adjusted to that at 20°C by using Q10, and listed it in a column labelled Adj r4 in Table 2. This is because different experiments were carried out at different temperatures, which have a large effect on the rate constants. Q10 of r4 is reported to be 3.75 (Dantzig et al. 1992) and 6.8 (Zhao and Kawai 1994). Their geometric average is Q10 = 5.05, which results in Q8≡Q100.8 = 3.65 and Q5≡Q100.5 = 2.25. This results in r4 to be in the range of 45–106 s−1 for most reports in Table 2. An exception is 27 s−1 (Wahr et al. 1997), because kTR was used, which gives a low value, as described in Sect. 3.3.5. Another exception is 181 s−1 (Ranatunga 1999a) with T-jump experiments, which may be affected by faster steps in the CB cycle. Our single myofibril experiment gave 234 s−1 (Kawai and Iorga 2024), which was also high because force was used for the calculation of r4, and the equilibrium in Fig. 6 was considered to be K3c = 0.1, resulting in a high value of r4.
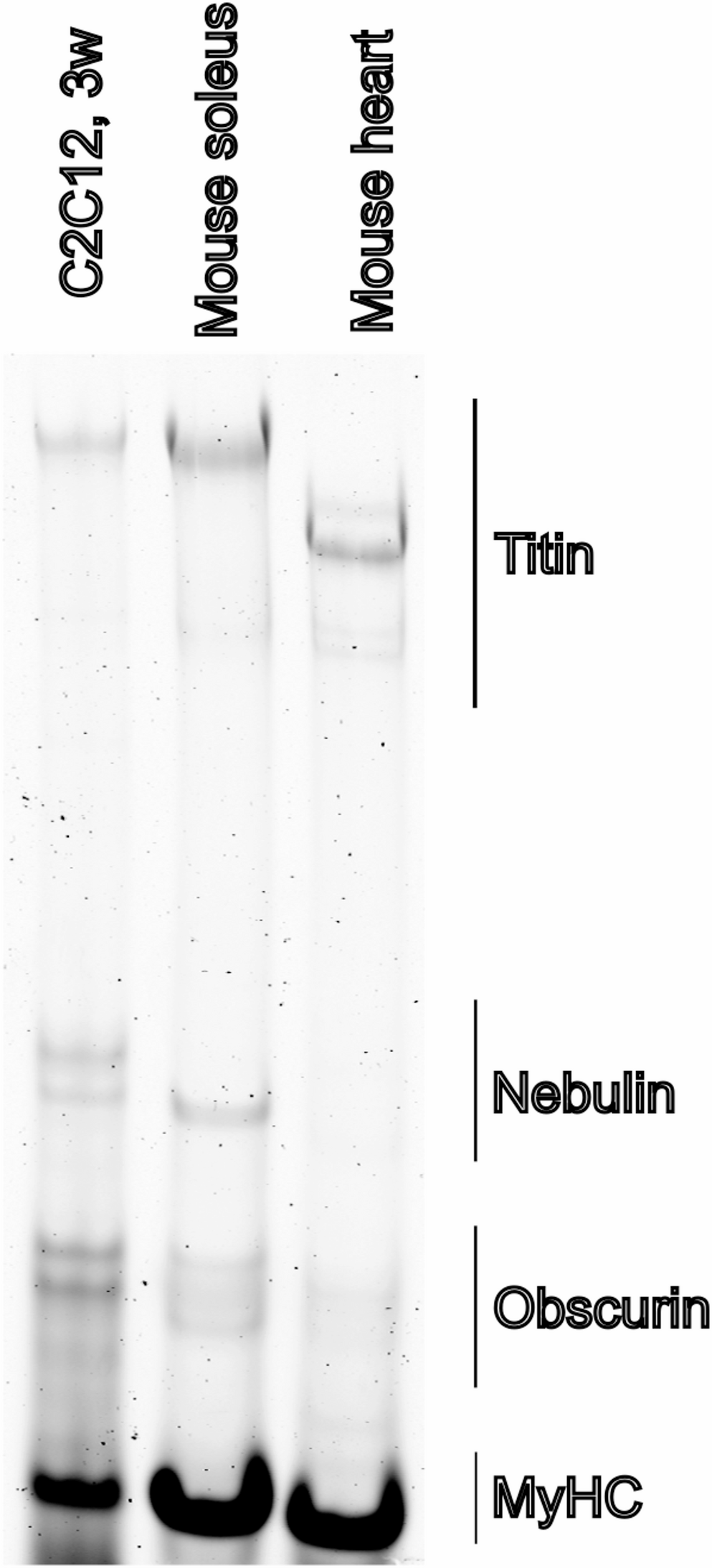
3.1.3. Results from other striated muscle fibersThe sinusoidal analysis method was applied to other striated muscle fibers: three types of fast-twitch fibers; slow-twitch fibers; and cardiac fibers; the results are summarized in Table 3. The results of sinusoidal analysis (frequency plots of the complex modulus, such as Nyquist plots) correlate perfectly well with biochemical analyses of fiber types by using myosin heavy chains (Galler et al. 2005) and light chains (Kawai and Schachat 1984); their characteristics were summarized in Figs. 4-4 and 4-5 of Kawai (2018b). Consequently, the fiber type can be determined as soon as sinusoidal analysis is finished (frequency plots are displayed on the computer screen 1 s after the measurement), without carrying out gel electrophoresis. This quick determination of the fiber type facilitates experiments, because an investigator can decide on next experiments while the fiber is still active in the experimental chamber. Correlation between fiber types and myosin heavy chain isoforms was experimentally shown in a solution study (Weiss et al. 2001).
Table 3 Results of kinetic studies on the Pi release step in various fiber types, mostly based on the rate constant 2πb of Process BAmong cardiac muscle fibers, it is noticeable that the rate constants are faster in smaller mammals than in larger mammals. This reflects the fact that the heart rate is faster in smaller mammals than in larger mammals. Steiger (1977) showed that the rate constant of oscillatory work correlates well with the heart rate; r4 and r−4 are the determinants of the oscillatory work. The difference in the rate constants between animals may stem from the difference in the myosin heavy chain (MHC) isoform distributions. It has been known that ventricles of larger mammals (e.g., bovine, human) carry β-MHC, whereas those of smaller mammals (e.g., mouse, rat) carry α-MHC. We showed that rats papillary muscles carrying α-MHC have faster r4 and r−4 than those carrying β-MHC (induced by propylthiouracil), which have slower r4 and r−4 (Table 3) (Kawai et al. 2016). This difference may stem from the MHC’s sequence difference in the segment 617–638. Another sequence difference in the segment 793–814 that attaches MLC, and that may act as a break for actomyosin interaction (Wang et al. 2013), because of the difference in ATP binding step K1 and CB detachment step r2 and r−2 (Kawai et al. 2016). It has been known that the ATP hydrolysis rate is faster in α-MHC than β-MHC (Deacon et al. 2012; Michael et al. 2014; Michael and Chandra 2016). The differences between the two myosin isoforms in the kinetic constants have been observed across multiple species (Millar and Geeves 1988; Ritchie et al. 1993; Bloemink et al. 2007).
3.1.4. CB occupancy at each stateFrom these kinetic constants, the CB probability (occupancy) at each state (X4, X5, and X6) is calculated as the function of P = [Pi] by using the Mass Action Law (X5 = K4X4, X6 = X5/K5P) with a constraint of: X4 + X5 + X6 = 1.
$$\text\, M\equiv 1_+\frac_}_P}=1+\frac_(1+_P)}_P}.$$
(5)
In Fig. 2B, X4, X5, X6, and X5 + X6 are plotted as functions of P. As expected, X4 and X5 are increasing functions of P, and X6 and X5 + X6 are decreasing functions of P. Steady state force (F1) is also measured before and after sinusoidal analyses, averaged, and studied as the function of P: F1 = F1(P). This is plotted in Fig. 2C (discrete points). As has been found by many investigators (Pate and Cooke 1989; Millar and Homsher 1990; Potma et al. 1995; Wahr et al. 1997; Tesi et al. 2002a), force is a decreasing and saturating function of P. Force supported by each CB state (T4, T5, and T6) is deduced based on the assumption that CBs are arranged in parallel in the half sarcomere, and that their force is additive (Kawai and Zhao 1993):
$$F_1(F)=T_4X_4+F_5X_5+F_6X_6=\frac_}_+\frac_}_P)M}_,$$
(6)
$$_\left(P\right)=\frac_\left(1+_P\right)}_P\right)M}_\,\quad\left(\text\,\,_=_\right),$$
(7)
$$}\;},\;F_ \left( 0 \right) \, = T_ ,$$
(8)
$$_\left(1/_\right)=\frac_}_}\left(_+_\right),$$
(9)
$$_\left(\infty \right)=\frac_}_}_,$$
(10)
where T4 is the force supported by X4; T5 is the force supported by X5, and T6 is the force supported by X6. We assume that X4 does not carry any force (T4 = 0), because this is the state before force generation. By fitting the data of force vs. P (Fig. 2C) to Eq. 6, using the data for K4 and K5 obtained from the rate constant study (Eq. 1 and Fig. 2A), we obtain T5 and T6. This is a standard linear fitting with two fitting parameters; hence, T5 and T6 can be readily deduced together with their confidence ranges. It turned out that T5≈T6 gives the best fit (Kawai and Halvorson 1991; Kawai and Zhao 1993; Wang and Kawai 1997; Kawai et al. 2018; Kawai and Iorga 2024), indicating that force generation occurs before Pi release, and that the same force is maintained after Pi release. Here NDF = 52 (if T5 = T6) and is large. Notice that X5 + X6 (Fig. 2B) provides a good match to the force vs. [Pi] plot (Fig. 2C). However, X6 alone does not fit the force data in Fig. 2C at all, suggesting that force generation does not occur after Pi release. The data in Fig. 2 were reproduced from Wang and Kawai (1997) in rabbit soleus slow-twitch fibers. The same was found to be the case for mouse soleus slow-twitch fibers (Kawai et al. 2018), for rabbit psoas fast-twitch fibers (Kawai and Halvorson 1991; Kawai and Zhao 1993), and in single myofibrils from rabbit psoas (Kawai and Iorga 2024).
3.1.5. Identification of CB statesIn Fig. 1B, we can then identify that X6 is the state after Pi release; hence, it is the strongly attached AM*ADP state. X5 is the state before Pi release with force; hence, it is the strongly attached AM*ADP.Pi state. X4 is the state before force generation; it can be either the detached state M.ADP.Pi, the weakly attached state AM.ADP.Pi, or the strongly attached state AM.ADP.Pi without force. These are depicted in Fig. 1C. Here the “weakly attached state” may mean the ionic interaction between actin and myosin, but so far no stable intermediate state has been identified. The strongly attached state indicates stereospecific and hydrophobic interactions between actin and myosin (Rayment et al. 1993a). In principle, the strongly attached AM.ADP.Pi state without force is essential for force generation, but this could be a short-lived transient state. Its brief existence was recently demonstrated in an experiment using cryo-electron microscopy (EM; Klebl et al. 2025). As soon as the no-force AM.ADP.Pi state is formed, it quickly goes to Step 4, as shown in the myosin V construct (Trivedi et al. 2015). The above analyses, based on fiber and myofibril experiments, concluded that force is generated in Step 4 before Pi is released, and the same force is maintained with Pi release. This conclusion is a direct interpretation of the data with statistics, based on a simple three-state model (Fig. 1B/C); hence, its confidence level is very high (less than ± 15% of the value).
Isometric force as a function of [Pi] has been measured by many investigators, including (Rüegg et al. 1971; Cooke and Pate 1985; Kawai 1986; Godt and Nosek 1989; Millar and Homsher
Comments (0)