
Remember me
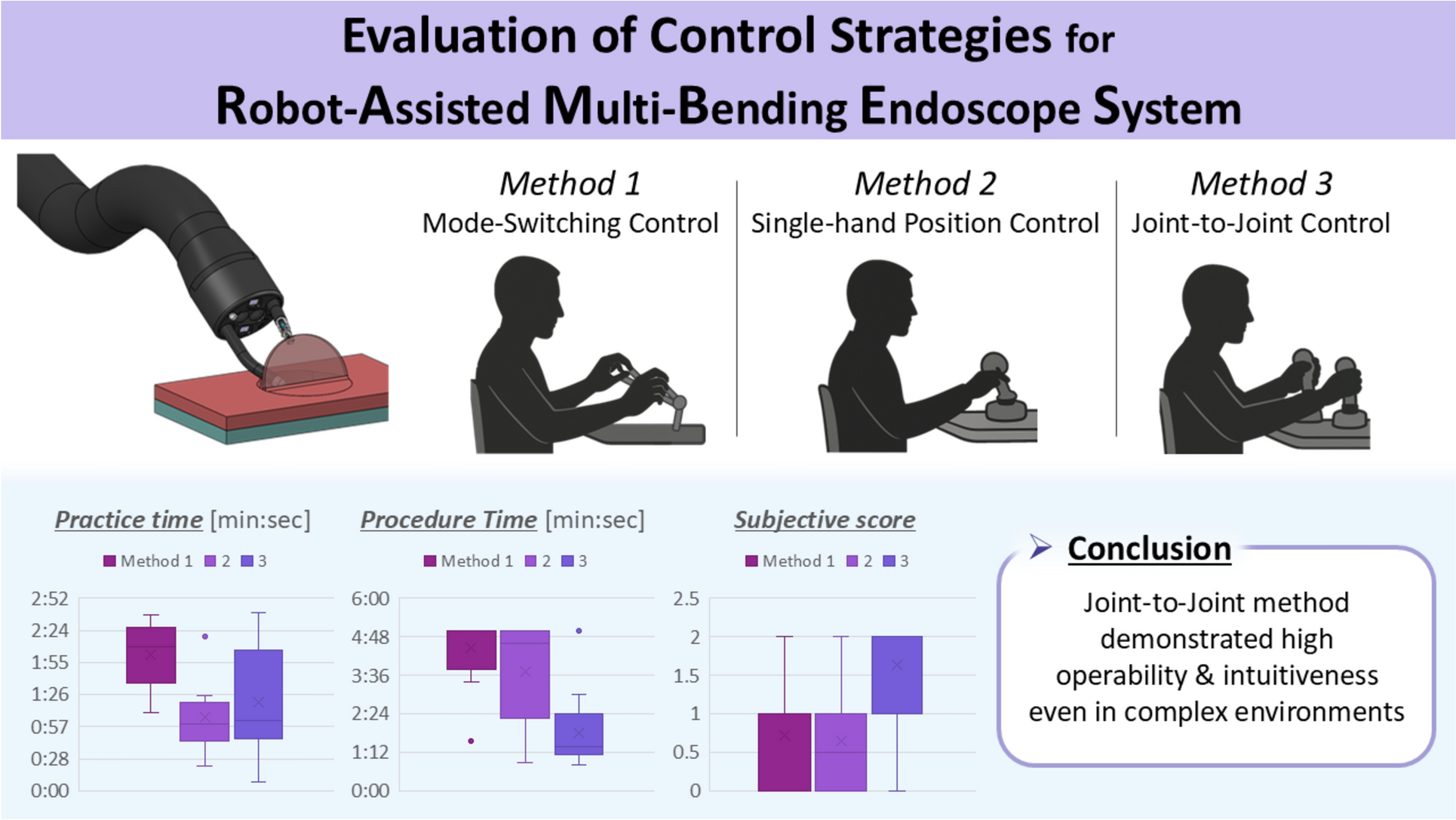
Multi-bending endoscopes, equipped with multiple articulating segments, enable multi-directional access to lesions and are considered valuable for high-difficulty procedures such as endoscopic submucosal dissection. However, because of their operational complexity, conventional manual manipulation often lacks intuitiveness and efficiency. This study aimed to implement and compare multiple control strategies for a multi-bending endoscope robot to identify the most effective and intuitive method of operation.
MethodsWe developed a master-follower robotic system consisting of a 6 degrees-of-freedom (DoF) multi-bending endoscope and 3DoF instrument followers. Three control strategies were implemented: mode-switching control (MS), single-hand position control (SP), and joint-to-joint control (JJ). A user study was conducted with 14 non-clinician participants. Objective and subjective evaluations were performed under two experimental conditions: with and without external obstacles.
ResultsIn the obstacle-free condition, both SP and JJ achieved significantly higher task success rates and shorter task completion times than MS. Under obstructed conditions, JJ demonstrated significantly superior performance relative to the other two methods. MS required the longest training time and exhibited the highest RAW-task load index workload scores, indicating a greater learning cost and higher operator burden. Subjectively, SP was rated as the most intuitive method in the obstacle-free environment, while JJ was considered the most intuitive under conditions involving obstacles.
ConclusionsThis study revealed that the effectiveness of control strategies for multi-bending endoscope manipulation is highly dependent on environmental conditions. Notably, the JJ method demonstrated strong operability and intuitiveness even in the presence of environmental interference, suggesting its potential as a promising control strategy for multi-bending endoscopic systems.
Graphical abstract
Comments (0)